
 |
| محل منبع: | جیانگ سو ، چین (سرزمین اصلی) |
| نام تجاری: | Jkongmotor |
| گواهی: | CE, ROHS,ISO9001 |
| شماره مدل: | JK57BLF03-17-X001 |
| مقدار حداقل تعداد سفارش: | 3-10 عدد |
|---|---|
| قیمت: | US$28~US$52 |
| جزئیات بسته بندی: | <i>with export carton .</i> <b>با کارتن صادراتی</b> <i>big quantity with pallet</i> <b>مقدار زیاد با |
| زمان تحویل: | برای نمونه ها ، 7-15 روز / برای دسته ، 15-25 روز |
| شرایط پرداخت: | T / T ، پی پال ، Western Union ، L / C |
| قابلیت ارائه: | 100000PCS / ماه |
| نما: | موتور Bldc 57 میلی متری | نگه داشتن گشتاور: | 0.32 نیوتن متر |
|---|---|---|---|
| طول موتور: | 87 میلی متر | تعداد فاز: | 3 فاز |
| تعداد لهستانی ها: | 4 | ولتاژ محاسبه شده: | 24 ولت |
| سرعت رتبه بندی شده: | 4500 دور در دقیقه | قدرت امتیازی: | 150 وات |
| درایور همسان: | JKBLD300 | درجه محافظت: | IP30 |
| طول شفت: | سفارشی شده | ||
| برجسته: | موتور bldc شفت بلند 24 ولت,موتور bldc بدون برس بدون شفت,موتور bldc بدون برس 4 قطبی |
||
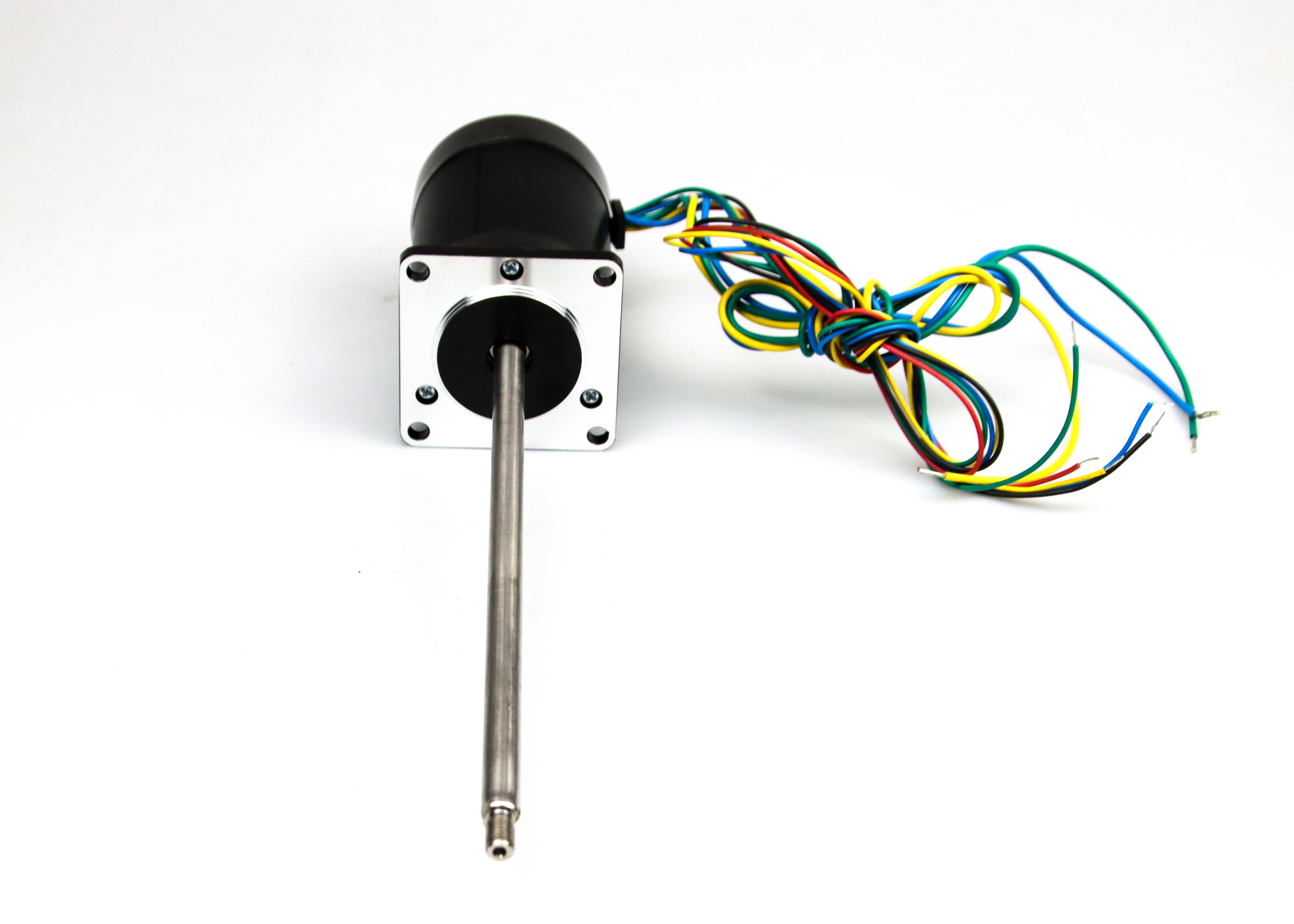
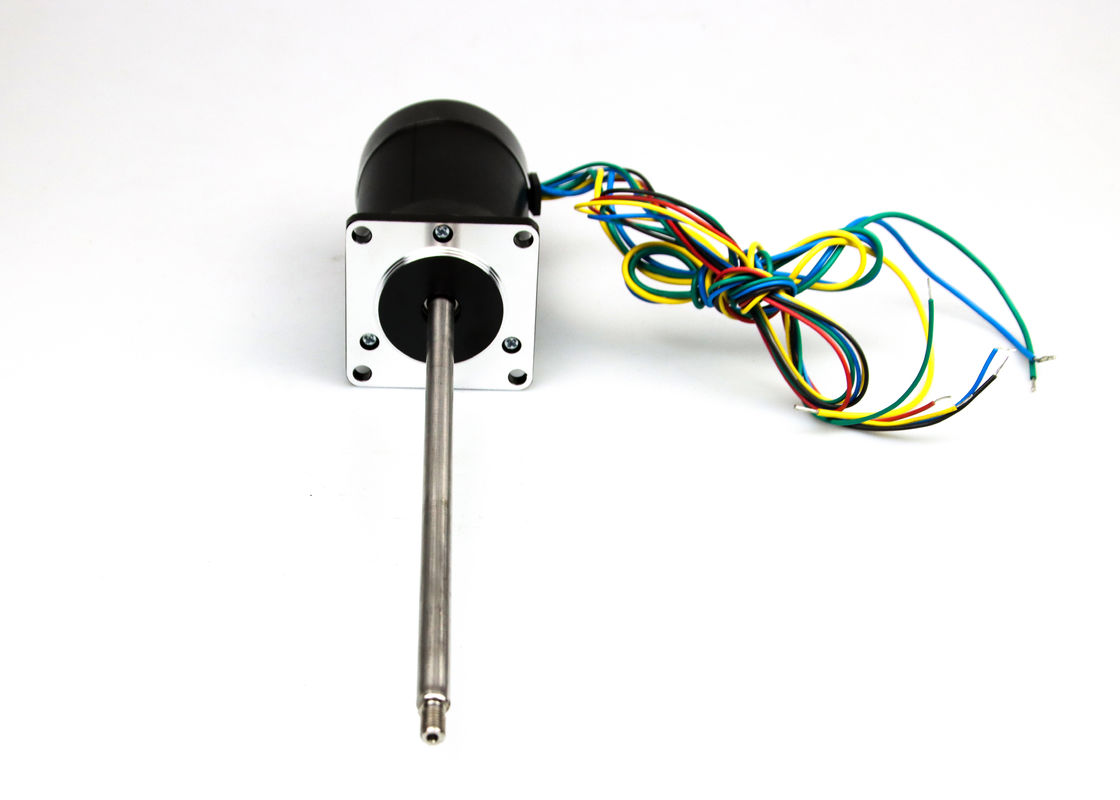
موتور سفارشی 24 ولتی 4 قطبی 150 واتی 4500 دور در دقیقه 57 میلی متری براشلس DC با شفت بلند
1. مشخصات عمومی موتور dc بدون جاروبک:
| (مورد) |
(مشخصات) |
| نوع سیم پیچ | ستاره |
| زاویه جلوه هال | زاویه الکتریکی 120 درجه |
| شفت تمام شد | 0.025 میلی متر |
| بازی شعاعی | 0.02 میلی متر × 450 گرم |
| پایان بازی | 0.08 میلی متر × 450 گرم |
| حداکثر نیروی شعاعی | 75N @20mm فلنج را تشکیل می دهد |
| حداکثر نیروی محوری | 15N |
| کلاس عایق | کلاس B |
| قدرت دی الکتریک | 500VDC برای یک دقیقه |
| مقاومت عایق | حداقل 100MΩ، 500VDC |
اختیاری: درایورهای الکترونیکی، رمزگذارها و گیربکسها، و همچنین تفکیککننده اثر هال و بازخورد بدون حسگر.
ما می توانیم ولتاژ و شفت خاص و غیره را طراحی کنیم.
motores paso a pas
2. مشخصات الکتریکی موتور BLDC 57 میلی متری:
| مدل | ||||||
| مشخصات | واحد | JK57BLS005 | JK57BLS01 | JK57BLS02 | JK57BLS03 | JK57BLS04 |
| تعداد فاز | فاز | 3 | ||||
| تعداد لهستانی ها | لهستانی ها | 4 | ||||
| ولتاژ محاسبه شده | VDC | 36 | ||||
| سرعت رتبه بندی شده | دور در دقیقه | 4000 | ||||
| گشتاور نامی | نیوتن متر | 0.055 | 0.11 | 0.22 | 0.33 | 0.44 |
| جریان رتبه بندی شده | آمپر | 1.2 | 2 | 3.6 | 5.3 | 6.8 |
| قدرت امتیازی | دبلیو | 23 | 46 | 92 | 138 | 184 |
| اوج گشتاور | نیوتن متر | 0.16 | 0.33 | 0.66 | 1 | 1.32 |
| اوج جریان | آمپر | 3.5 | 6.8 | 11.5 | 15.5 | 20.5 |
| EMF پشت | V/Krpm | 7.8 | 7.7 | 7.4 | 7.3 | 7.1 |
| ثابت گشتاور | Nm/A | 0.074 | 0.073 | 0.07 | 0.07 | 0.068 |
| اینرسی روتور | gc㎡ | 30 | 75 | 119 | 173 | 230 |
| طول بدن | میلی متر | 37 | 47 | 67 | 87 | 107 |
| وزن | کیلوگرم | 0.33 | 0.44 | 0.75 | 1 | 1.25 |
| سنسور | هانیول | |||||
| کلاس عایق | ب | |||||
| درجه محافظت | IP30 | |||||
| دمای ذخیره سازی | -25+70℃ | |||||
| دمای عملیاتی | -15+50℃ | |||||
| رطوبت کاری | ≤85% RH | |||||
| محیط کار | در فضای باز (بدون نور مستقیم خورشید)، بدون گاز خورنده، بدون گاز قابل اشتعال، بدون غبار روغن، بدون گرد و غبار | |||||
| ارتفاع | زیر 1000 متر | |||||
3. درایور bldc مطابق: JKBLD300
![]()
4. ابعادموتور dc براش:(واحد = میلی متر)
![]()
![]()
5-تجهیزات را تولید کنید:
![]()
6. فرآیند تولید:
![]()
7. سفارشیازموتور الکتریکی براشلس 150 وات:
8. برنامه های کاربردیموتورهای براشلس dc 24 ولت:
میتوان انتظار داشت که در آینده شاهد استفاده از موتورهای BLDC در طیف وسیعتری از کاربردها باشیم.به عنوان مثال، احتمالاً به طور گسترده برای هدایت رباتهای خدماتی مورد استفاده قرار خواهند گرفت - روباتهای کوچکی که خدماتی را در زمینههایی غیر از تولید ارائه میکنند.ممکن است تصور شود که موتورهای پله ای در این نوع کاربردها مناسب تر هستند، جایی که می توان از پالس ها برای کنترل دقیق موقعیت استفاده کرد.اما موتورهای BLDC برای کنترل نیرو مناسب تر هستند.و با یک موتور پله ای، نگه داشتن موقعیت ساختاری مانند بازوی ربات به جریان نسبتاً زیاد و پیوسته ای نیاز دارد.با یک موتور BLDC، تنها چیزی که مورد نیاز است یک جریان متناسب با نیروی خارجی است که امکان کنترل با قدرت کارآمدتری را فراهم می کند.موتورهای BLDC ممکن است جایگزین موتورهای dc ساده برس خورده در گاری های گلف و چرخ دستی شوند.موتورهای BLDC علاوه بر کارایی بهتر، می توانند کنترل دقیق تری را نیز ارائه دهند که به نوبه خود می تواند عمر باتری را بیشتر کند.
موتورهای BLDC برای هواپیماهای بدون سرنشین نیز ایده آل هستند.توانایی آنها در ارائه کنترل دقیق آنها را به ویژه برای پهپادهای چند روتوری مناسب می کند، جایی که وضعیت پهپاد با کنترل دقیق سرعت چرخش هر روتور کنترل می شود.
![]()
![]()
موتورهای الکتریکی را می توان با توجه به ویژگی هایشان به انواع مختلفی تقسیم کرد، مانند موتورهای AC، موتورهای پله ای و موتورهای DC.در مقایسه با انواع دیگر، موتورهای DC از گشتاور راه اندازی بالا و توانایی چرخش در سرعت های بالا بهره می برند.آنها از مسائل لغزش یا از دست دادن هماهنگی رنج نمی برند.
موتورهای DC را می توان به موتورهای DC برس دار و موتورهای DC بدون جاروبک تقسیم کرد، بسته به اینکه آنها برس (الکترود) دارند یا خیر.
موتورهای DC برس خورده
این موتورها از طریق اتصال مکانیکی بین کموتاتور و برس کار می کنند.با چرخش موتور، برس ها و کموتاتور در تماس مداوم هستند.این امر باعث سایش موتورها با استفاده طولانی مدت می شود که در نهایت می تواند منجر به خرابی موتور شود.به همین دلیل، موتورهای DC برس دار عمر کوتاه تری نسبت به موتورهای DC بدون جاروبک دارند و نیاز به تعمیر و نگهداری منظم دارند.یکی دیگر از معایب صدای الکتریکی و صوتی ناشی از تماس مداوم بین برس ها و کموتاتور هنگام چرخش موتور است.
موتورهای DC بدون جاروبک
این موتورها به جای برس و کموتاتور از وسایل الکترونیکی (مدار محرک) برای چرخاندن موتور استفاده می کنند.نداشتن برس و کموتاتور که هر دو جزء مصرفی هستند به موتورها عمر طولانی می بخشد و تعمیر و نگهداری را آسان می کند.مزیت دیگر عملکرد بی صدا است زیرا از نویز ایجاد شده از تماس بین برس ها و کموتاتور رنج نمی برند.
تماس با شخص: Stacy
تلفن: +8613776803450
فکس: 86-519-88713769
نشانی: ساختمان A2، منطقه صنعتی هوتانگ، خیابان لینگدائو، منطقه ووجین، چانگژو، چین. زیپ: 213162
آدرس کارخانه:ساختمان A2، منطقه صنعتی هوتانگ، خیابان لینگدائو، منطقه ووجین، چانگژو، چین. زیپ: 213162







