
 |
| محل منبع: | جیانگ سو ، چین (سرزمین اصلی) |
| نام تجاری: | Jkongmotor |
| گواهی: | CE, ROHS,ISO9001 |
| شماره مدل: | NEMA17 JK42HS |
| مقدار حداقل تعداد سفارش: | 3-10 عدد |
|---|---|
| قیمت: | US$3~US$8 |
| جزئیات بسته بندی: | <i>with export carton .</i> <b>با کارتن صادراتی</b> <i>big quantity with pallet</i> <b>مقدار زیاد با |
| زمان تحویل: | برای نمونه ها ، 7-15 روز / برای دسته ، 15-25 روز |
| شرایط پرداخت: | T / T ، پی پال ، Western Union ، L / C |
| قابلیت ارائه: | 100000PCS / ماه |
| شافت: | تک یا دوتایی | منجر می شود: | 4/6 |
|---|---|---|---|
| جاری: | 0.4A / 1.7A | نگه داشتن گشتاور: | 1.5 کیلوگرم سانتی متر - 7.3 کیلوگرم سانتی متر |
| زاویه مرحله: | 1.8 درجه | وزن: | 0.15 کیلوگرم - 0.55 کیلوگرم |
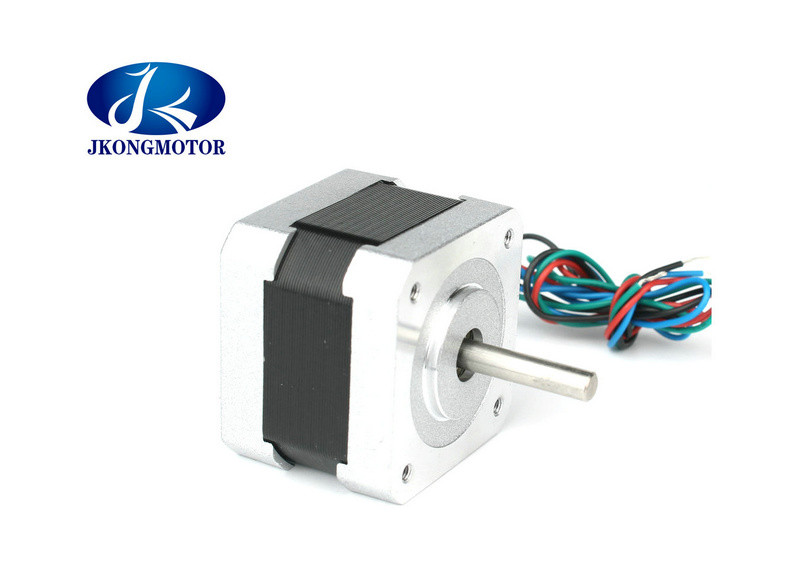
| برجسته: | موتور پله ای برقی,موتور پله نما |
||
موتور پله ای ترکیبی Nema17 برای چاپگر سه بعدی / گشتاور بالا موتور پله ای 42 میلی متری 2.2 کیلوگرم. سانتی متر - 7.3 کیلوگرم سانتی متر
1. مشخصات Genaral:
| مورد | مشخصات فنی |
| زاویه گام | 1.8 درجه |
| افزایش دما | حداکثر 80 |
| دمای محیط | -20 ℃ ~ + 50 |
| مقاومت عایق | 100 مگاوات در دقیقه، 500VDC |
| قدرت دی الکتریک | 500 ولت برای 1 دقیقه |
| شفت شعاعی بازی | 0.02 حداکثر(450 گرم بار) |
| شفت محوری بازی | 0.08 حداکثر(450 گرم بار) |
| حداکثرنیروی شعاعی | 28N (20 میلی متر از فلنج) |
| حداکثرنیروی محوری | 10N |
2. مشخصات برق:
| شماره مدل | زاویه گام | طول موتور |
جاری /فاز |
مقاومت /فاز |
القا /فاز |
نگه داشتن گشتاور | # از سرب | گشتاور بازدارنده | اینرسی روتور | جرم |
| (°) | (L) میلی متر | آ | Ω | mH | کیلوگرم سانتی متر | نه | g.cm | g.cm | کیلوگرم | |
| JK42HS34-1334 | 1.8 | 34 | 1.33 | 2.1 | 2.5 | 2.2 | 4 | 120 | 34 | 0.22 |
| JK42HS34-0406 | 1.8 | 34 | 0.4 | 24 | 15 | 1.6 | 6 | 120 | 34 | 0.22 |
| JK42HS34-0956 | 1.8 | 34 | 0.95 | 4.2 | 2.5 | 1.6 | 6 | 120 | 34 | 0.22 |
| JK42HS40-0406 | 1.8 | 40 | 0.4 | 30 | 30 | 2.6 | 6 | 150 | 54 | 0.28 |
| JK42HS40-1704 | 1.8 | 40 | 1.7 | 1.5 | 2.3 | 4.2 | 4 | 150 | 54 | 0.28 |
| JK42HS40-1684 | 1.8 | 40 | 68/1 | 65/1 | 3.2 | 3.6 | 4 | 150 | 54 | 0.28 |
| JK42HS40-1206 | 1.8 | 40 | 1.2 | 3 | 2.7 | 2.9 | 6 | 150 | 54 | 0.28 |
| JK42HS48-0406 | 1.8 | 48 | 0.4 | 30 | 25 | 3.1 | 6 | 260 | 68 | 0.35 |
| JK42HS48-1684 | 1.8 | 48 | 68/1 | 65/1 | 2.8 | 4.4 | 4 | 260 | 68 | 0.35 |
| JK42HS48-1206 | 1.8 | 48 | 1.2 | 3.3 | 2.8 | 3.17 | 6 | 260 | 68 | 0.35 |
| JK42HS60-0406 | 1.8 | 60 | 0.4 | 30 | 39 | 6.5 | 6 | 280 | 102 | 0.5 |
| JK42HS60-1704 | 1.8 | 60 | 1.7 | 3 | 6.2 | 7.3 | 4 | 280 | 102 | 0.5 |
| JK42HS60-1206 | 1.8 | 60 | 1.2 | 6 | 7 | 5.6 | 6 | 280 | 102 | 0.5 |
3. ابعاد: (واحد = میلی متر)
![]()
4. نمودار سیم کشی:
![]()
![]()
5. سفارشی
![]()
![]()
مزایای
موتورهای استپ کنترل شده کامپیوتری نوعی سیستم موقعیت یابی کنترل حرکت هستند.آنها معمولاً به عنوان بخشی از یک سیستم حلقه باز برای استفاده در برنامه های نگهداری یا موقعیت یابی به صورت دیجیتالی کنترل می شوند.
در زمینه لیزرها و اپتیک ها اغلب از آنها در تجهیزات موقعیت یابی دقیق مانند محرک های خطی ، مراحل خطی ، مراحل چرخش ، گونیومتر و پایه آینه استفاده می شود.سایر کاربردها در ماشین آلات بسته بندی و موقعیت یابی مراحل پایانی شیر برای سیستم های کنترل سیال است.
از نظر تجاری ، موتورهای پله ای در درایو های floppy disk ، اسکنرهای مسطح ، چاپگرهای رایانه ای ، پلاترها ، دستگاه های حافظه ، اسکنرهای تصویر ، درایو های دیسک فشرده ، روشنایی هوشمند ، لنزهای دوربین ، دستگاه های CNC و اخیراً در چاپگرهای 3D استفاده می شوند.
تماس با شخص: Miss. Annie
تلفن: +8615995098661
فکس: 86-519-88713769
نشانی: ساختمان A2، منطقه صنعتی هوتانگ، خیابان لینگدائو، منطقه ووجین، چانگژو، چین. زیپ: 213162
آدرس کارخانه:ساختمان A2، منطقه صنعتی هوتانگ، خیابان لینگدائو، منطقه ووجین، چانگژو، چین. زیپ: 213162




